최신 재활로봇 기술 정보공유 및 연구 결과 발표를 위한 토론의 장 마련
국립재활원(원장 강윤규)은 지난 12일 오전 9시 대한상공회의소에서 '2023 재활로봇 학술토론회(심포지엄)'를 개최했다.

재활로봇 학술토론회(이하 심포지엄)는 의료재활로봇 개발과 활성화를 위해 2012년부터 개최됐으며, 올해는 대면 및 유튜브 온라인 중계 방식으로 동시 개최됐다.
재활로봇중개연구사업단의 재활로봇중개연구사업은 재활의학 전문의, 임상 치료사, 공학자 등 전문인력과 기업, 대학교, 연구소, 병원 등이 협력하여 다양한 로봇기술을 재활 임상현장에 연계하는 중개 연구를 실시하고 재활로봇 활용을 활성화함으로써 장애인의 삶의 질 개선을 위해 수행하는 사업이다.
이번 학술토론회는 그간 진행된 재활로봇중개연구사업의 다양한 성과와 우수사례 발표 및 재활 로봇의 최신동향과 관련 정보들을 공유하는 자리로, 총 5개의 세션으로 진행됐다.
세션 1은 '재활로봇중개연구의 동향, 상지 신경근 협응, 유연 착용형 로봇'에 대한 주제로 4개의 발표로 이루어졌으며, 서울아산병원 전민호 교수가 좌장을 맡는다. 국립재활원 재활로봇중개연구사업단 송원경 단장의 '재활로봇 네트워킹을 통한 도약'에 대한 발표를 시작으로 ㈜위더피플아이피컨설팅 이수철 변리사의 '상지와 손의 지식재산권 현황분석', 한국과학기술원 박형순 교수의 '근전도 기반 능동 보조 방식의 실시간 상호작용이 가능한 증강/가상현실 기반 상지 신경근 협응 재활시스템 중개연구', 세종대학교 강병현 교수의 ‘유연한 착용형 하지 보조로봇의 중개연구’에 대한 연구결과 발표가 차례대로 진행됐다.
세션 2의 기조연설에서는 세계적으로 관심도가 높은 최신 기술인 '뇌 가소성과 뇌졸중 후 운동 회복: 뇌 영상에서의 신경 상관관계'에 대하여 삼성서울병원 김대현 교수가 발표했다.
세션 3은 '재활로봇중개연구 상지 분야 연구성과'에 대한 주제로 3개의 발표가 진행되며, 단국대학교 허경무 교수가 좌장을 맡았다. 먼저, 서울대학교 정봉근 교수의 '장애 아동의 손 기능 분석 및 증진을 위한 유연한 장갑형 손 로봇 중개연구'에 대한 발표를 시작으로 경북대학교 오건영 교수의 '일상생활 동작을 모사하기 위한 착용형 상지 재활운동장치의 신뢰성과 성능 향상 및 인허가', 알피오 이진원 이사의 '줄꼬임 구동기를 이용하는 소프트 상지재활로봇의 중개연구'에 대한 연구결과 발표가 차례대로 진행됐다.
세션 4는 '재활로봇중개연구 하지 분야 연구성과'에 대한 주제로 3개의 발표가 진행되며, 한국과학기술연구원 이송주 책임 연구원이 좌장을 맡았다.
세종대학교 곽관웅 교수의 '재활로봇 안전 및 성능평가를 위한 로봇더미 (Dummy) 개발 중개연구'에 대한 발표를 시작으로 (주)코트라스 석동욱 본부장의 '아동용 보행훈련로봇의 성능향상 및 인허가', 국립재활원 신준호 과장의 '뇌졸중 환자 대상 점진적 저항 보행 훈련의 효과 확인 연구'에 대한 연구결과 발표가 차례대로 진행됐다.
마지막 세션에서는 '재활로봇에 대한 제어·학습 분야 연구성과'에 대한 주제로 3개의 발표가 진행됐으며, 한경국립대학교 신영일 교수님이 좌장을 맡는다. 먼저, 울산과학기술원 강상훈 교수의 '재활로봇의 안전성과 성능 향상을 위한 제어알고리즘 고도화 중개연구'를 시작으로 가천대학교 오영민 교수의 '운동학습 모델을 적용한 맞춤형 일상재활 로봇을 위한 운동 평가 및 피드백 인공지능 시스템 개발', 국립재활원 송원경 과장의 '다방향성 양팔/양손 운동 상호작용 기술 기반 차세대 상지재활로봇 플랫폼 구현 및 상지운동 데이터 수집'에 대한 연구결과 발표가 차례대로 진행됐다.
국립재활원 강윤규 원장은 "이번 재활 로봇 학술토론회를 통해 재활로봇중개연구의 다양한 스펙트럼에 대해 이해하고 재활로봇중개연구사업이 장애인 및 노약자에게 실질적인 도움이 될 수 있도록 논의하는 발전적인 시간이 되길 기대한다"라고 밝혔다.
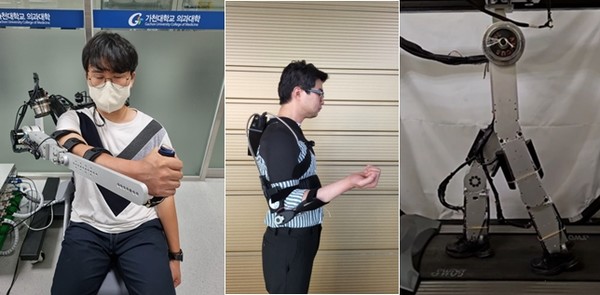
(1) 어깨 관절 재활로봇 가천대학교 김광기 교수 연구팀
(2) 줄꼬임을 이용한 상지 재활로봇 한국과학기술원 유지환 교수 연구팀
(3) 재활로봇 안전 및 성능평가를 위한 로봇 더미(Dummy) 세종대학교 곽관웅 교수 연구팀